ステッピングモータの制御1
さて、いよいよ本日からステッピングモータ制御の長い道のりが始まります。午後3時過ぎからぼちぼちと作業を始めました。
今日は、秋月電子のPICステッピングモータドライブキットを作ります。このキットはPIC16C56っていうマイコンを使ってステッピングモータを正転・逆転・停止させることができるキットです。しかし、このキットだけでは目的である「好きな角度だけ回して止める」という制御はできません。このキットをベースにして改良を加え、目的を実現できる回路を造って行きます。
とりあえずはキットをそのまま組み立てます。

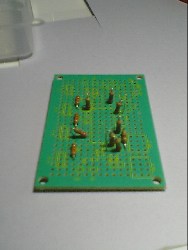
まずは気を使わなくてもいい抵抗からハンダ付け。配線バイスを駆使して取り付けました。

続いて極性のあるダイオードや電解コンデンサー、マイコンを差すICソケットをハンダ付け。今回は細かい作業用のこて先の細いハンダごてを使いましたが、私はこれがちょっと苦手です。だってハンダが融けにくいんだもん。やっぱり最後に残した熱に弱いトランジスタやICで手間取りました。壊してるかも。

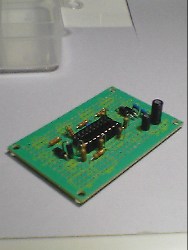
不安を残しつつ形としてはできました。基板上のソケットにマイコンを差して完成。


ここで動作試験と行きたいところですが・・・できません。モーターからは5本の線が出ていて、一つのコネクタにまとめられています。一方、キットの方は・・・実は基板の左端と右端に分かれて、それぞれ2本分の端子が付いているのです。残り1本は基板の右下の端子に繋げねばなりません。
動作試験の前に、5本の端子から出る配線を1つのコネクタにまとめてやらなくてはなりません。また、キットではプッシュスイッチを直付けしてモータを回すようになっているのですが、最終的には遠隔操作でスイッチ制御をすることになります。そこでスイッチを取り付ける場所には配線を引き出す端子を付けました。次回は、この5本の線をモータと接続するコネクタとスイッチをまとめて別回路にします。この別回路は実験にあわせて変更していくのでブレッドボードという仮組基板を使って作ります。
今日はここまで!
とりあえずはキットをそのまま組み立てます。
まずは気を使わなくてもいい抵抗からハンダ付け。配線バイスを駆使して取り付けました。
続いて極性のあるダイオードや電解コンデンサー、マイコンを差すICソケットをハンダ付け。今回は細かい作業用のこて先の細いハンダごてを使いましたが、私はこれがちょっと苦手です。だってハンダが融けにくいんだもん。やっぱり最後に残した熱に弱いトランジスタやICで手間取りました。壊してるかも。
不安を残しつつ形としてはできました。基板上のソケットにマイコンを差して完成。
ここで動作試験と行きたいところですが・・・できません。モーターからは5本の線が出ていて、一つのコネクタにまとめられています。一方、キットの方は・・・実は基板の左端と右端に分かれて、それぞれ2本分の端子が付いているのです。残り1本は基板の右下の端子に繋げねばなりません。
動作試験の前に、5本の端子から出る配線を1つのコネクタにまとめてやらなくてはなりません。また、キットではプッシュスイッチを直付けしてモータを回すようになっているのですが、最終的には遠隔操作でスイッチ制御をすることになります。そこでスイッチを取り付ける場所には配線を引き出す端子を付けました。次回は、この5本の線をモータと接続するコネクタとスイッチをまとめて別回路にします。この別回路は実験にあわせて変更していくのでブレッドボードという仮組基板を使って作ります。
今日はここまで!
Posted: 土 - 1月 28, 2006 at 10:24 午後
Quick Links
Calendar
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
Categories
Archives
XML/RSS Feed
Comments powered by
Statistics
Total entries in this blog:
Total entries in this category:
Published On: 1 28, 2006 10:52 午後
Total entries in this category:
Published On: 1 28, 2006 10:52 午後